
Written by: Choon Kiat William Chia
Benchmarking of Offshore Platforms
Offshore platforms can be broadly divided into two categories, bottom-supported or floating platforms. Examples of bottom-supported structures include fixed jacket platforms, jack-ups, gravity-based structures, compliant towers etc. On the other hand, examples of floating platforms include semi-submersible, spar, tension-leg platform etc. For this project and as shown in Figure 1, the following offshore platform configurations were considered for further investigation:
- Configuration 1: Fixed – Jacket structure
- Configuration 2: Fixed – Gravity based structure
- Configuration 3: Floating – Semi-submersible
- Configuration 4: Floating – Tension-leg platform (TLP)
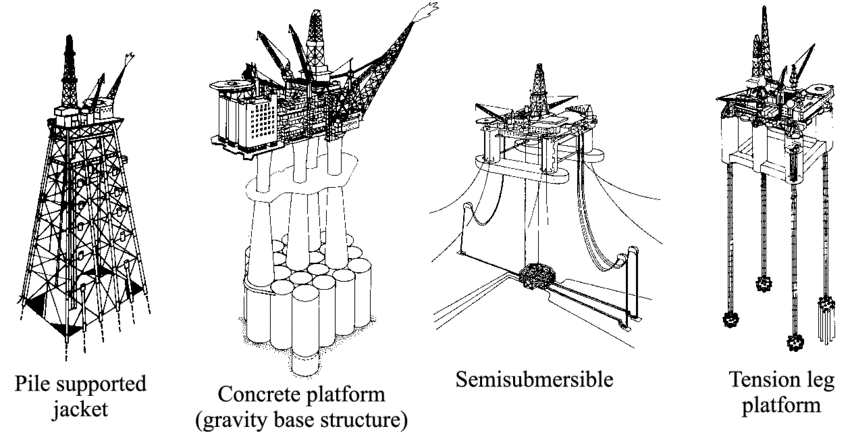
Figure 1: Examples of the considered platform configurations (Birk, 1998).
Similar to that for offshore hydrogen production concept, a decision matrix would be used to assess the suitability of each platform configuration. Table 1 shows the factors considered while determining the feasibility of the platform configuration. For every factor considered, a relative score from a range of one (least optimal) to four (most optimal) was assigned to each platform configuration. By taking into account of the relative weighting, the configuration with the highest sum of score would be selected.
Table 1: Factors considered while choosing the optimal platform configuration.
Chosen Platform Configuration for the IPP
Based on the factors established, it can be seen from the decision matrix in Table 2 that Fixed Jacket Platform (Configuration 1) has the highest score and hence was the selected configuration for further development in this project.
Table 2: Decision matrix for selection of platform configuration.
| Factor | Relative Weighting | Configuration 1 | Configuration 2 | Configuration 3 | Configuration 4 | ||||
| Score | Total | Score | Total | Score | Total | Score | Total | ||
| Suitability for the Specified Water Depth | 40% | 4 | 1.60 | 3 | 1.20 | 1 | 0.40 | 2 | 0.80 |
| Sensitivity to Environmental Loads | 30% | 4 | 1.20 | 3 | 0.90 | 2 | 0.60 | 1 | 0.30 |
| Ease of Installation and Decommissioning | 15% | 1 | 0.15 | 2 | 0.30 | 4 | 0.60 | 3 | 0.45 |
| Cost | 15% | 4 | 0.60 | 3 | 0.45 | 1 | 0.15 | 2 | 0.30 |
| Total Score | 3.55 | 2.85 | 1.75 | 1.85 | |||||
For water depth consideration, floating structures such as semi-submersible are generally used in deeper waters while those for fixed structures are generally restricted to shallower waters. As a result, as seen from Figure 2, given the design water depth is only 100 m, fixed platform such as jacket structure is the most suitable platform configuration for such relatively shallow water.
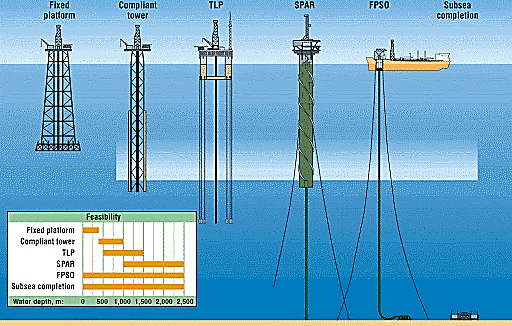
Figure 2: Feasibility of various offshore platforms in different water depths (Bourgeois, Godfrey, & Bailey, 1998).
While designing an offshore platform, it is important to ensure that the motion response of the platform lies outside of the excitation range of the sea-state. Being a fixed platform, jacket structure has a low natural period of vibration (usually lower than 4 s). As shown in Figure 3, compared to the motion responses for other platfrom configurations, this value is far away from the period of the North Sea storm wave (approximtely 15-18 s) (Chakrabarti, 2005). As a result, it is the least sensititive configuration to environmental loads.
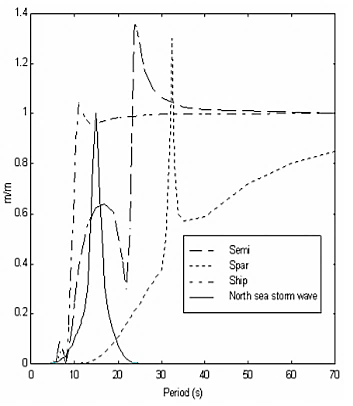
Figure 3: Typical heave transfer function for different platform configurations compared with North Sea storm waves (DNV, 2010).
For ease of installation and decommissioning, jacket structure scores the lowest as to decommission a fixed platform, it has to removed using heavy lift equipment. On the other hand, floating structures such as semi-submersible can be readily decommissioned and towed to another site for second use. Furthermore, fixed structure is always the cheaper option for shallower waters while floating structures such as semi-submersible only becomes economically attractive when the water is much deeper (Chakrabarti, 2005).
Once the platform configuration had been decided, the next stage would be to consolidate the design basis for the Integrated Processing Platform (IPP).
References
Birk, L. (1998). Hydrodynamic Shape Optimisation of Offshore Structures. Technische Universit¨at Berlin, https://www.researchgate.net/profile/Lothar_Birk/publication/34689714_Hydrodynamic_shape_optimization_of_offshore_structures/links/5cdb9d7e458515712eac2045/Hydrodynamic-shape-optimization-of-offshore-structures.pdf
Bourgeois, T. M., Godfrey, D. G., & Bailey, M. J. (1998). Race on for deepwater acreage, 3,500-meter depth capability. Offshore.
Chakrabarti, S. (2005). Handbook of Offshore Engineering (2-volume set): Elsevier.
DNV. (2010). DNV-RP-F205: Global Performance Analysis of Deepwater Floating Structures. In. https://rules.dnvgl.com/docs/pdf/DNV/codes/docs/2010-10/RP-F205.pdf.